


































产品
动态



相关推荐
今日热榜






4 加速产数融合,深化数字赋能——钉钉(中国)信息技术有限公司领导一行参访建管家总部
5 建管家受邀出席2023工程建设企业战略转型研讨会,与精英企业家共探数字转型新路径
6 建管家入选中国建筑业协会"2023建筑业数字化服务商",为中国建筑产业数字化转型提速加码!
7 “最强大脑,一战成名” | 2023建管家第二届"建服杯"全国知识竞赛决赛圆满落幕
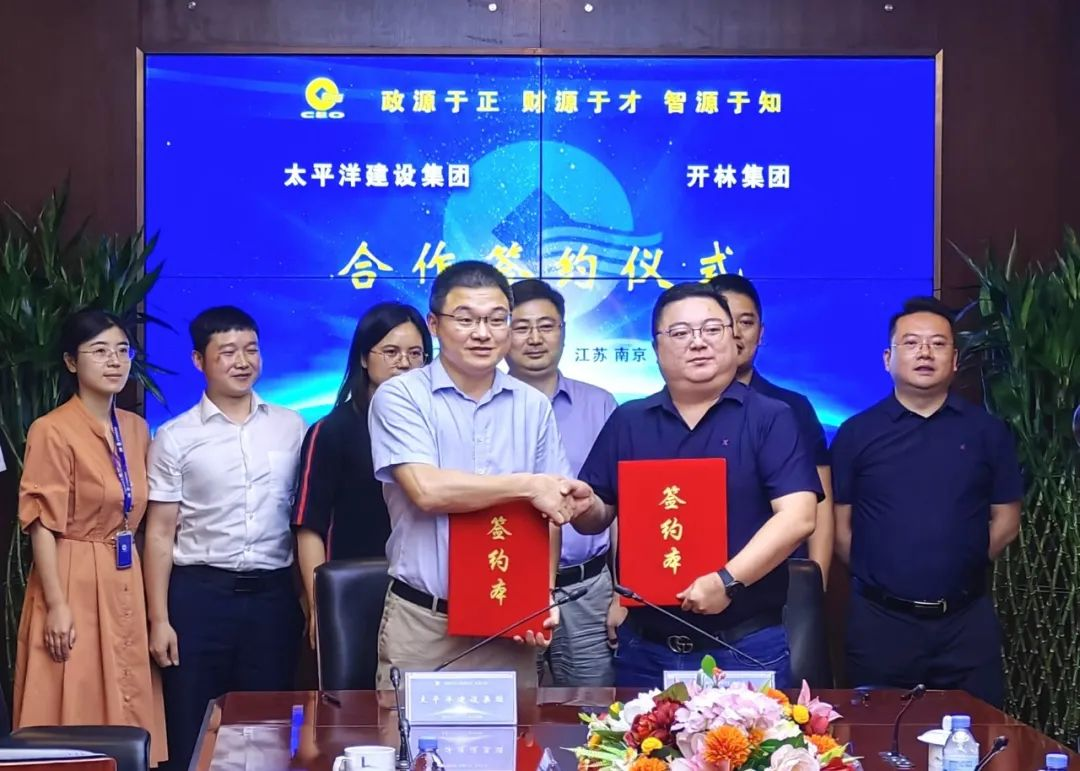
8 加快数字转型,赋能建筑产业发展升级 | 建管家与太平洋建设集团签署战略合作协议

热门企业
人员:53人 |
业绩:108个 |
资质:44项
人员:248人 |
业绩:4805个 |
资质:34项
人员:1978人 |
业绩:458个 |
资质:38项
人员:777人 |
业绩:14个 |
资质:5项
人员:12人 |
业绩:0个 |
资质:0项
人员:31人 |
业绩:59个 |
资质:7项
人员:109人 |
业绩:18个 |
资质:54项
人员:29人 |
业绩:0个 |
资质:35项
人员:9548人 |
业绩:704个 |
资质:48项
人员:10859人 |
业绩:2307个 |
资质:49项



 渝公网安备:
渝公网安备: